
















- Главная
- Блог
- Справочник
- ТЕХНИЧЕСКИЕ ПАРАМЕТРЫ РЕДУКТОРОВ
ТЕХНИЧЕСКИЕ ПАРАМЕТРЫ РЕДУКТОРОВ
25.01.2022
17221
Содержание:
- Методика расчета консольных нагрузок на выходной вал
- Методика расчета консольных нагрузок на входной вал
1. Методика расчета консольных нагрузок на выходной вал
Радиальная нагрузка
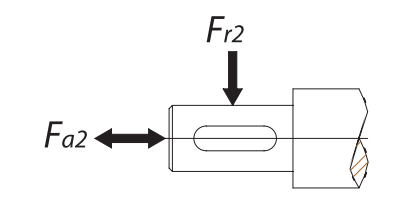
Для правильного выбора редуктора действующая радиальная нагрузка на выходном валу редуктора Fr не должна превышать максимально допустимого значения, указанного в таблице выбора Fr2 (см. стр. 124). Действующая радиальная нагрузка рассчитывается по формуле:
Методика выбора габарита редуктора серии MRD, исходя из радиальной нагрузки на выходной вал:
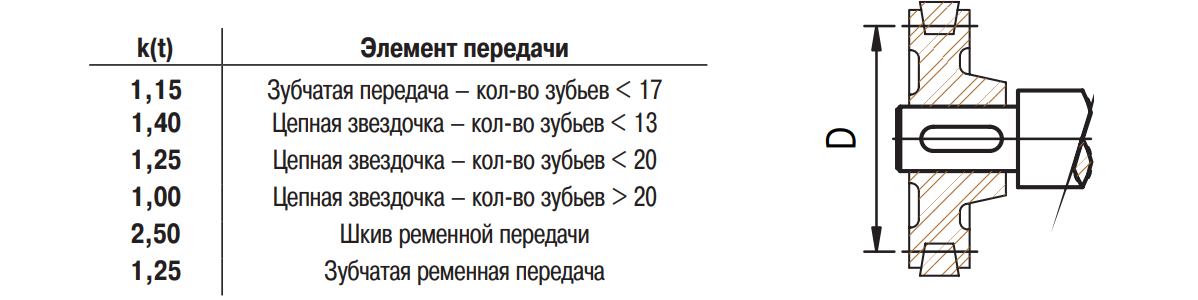
- Определяем место приложения радиальной нагрузки, расстояние Х (см. рис.)
- Выбираем из таблицы, в соответствии с нужным габаритом, коэффициенты a, b, c.
- Определяем максимально допустимую радиальную нагрузку, действующую на подшипники, при чем полученное значение должно быть больше действующей радиальной нагрузки (*):

- Определяем максимально допустимую радиальную нагрузку, действующую на выходной вал, при чем полученное значение должно быть больше действующей радиальной нагрузки (**):

Редуктор считается выбранным правильно, если выполнены оба условия (*) и (**).
Осевая нагрузка
Осевая нагрузка рассчитывается по ниже приведенной формуле:
2. Методика расчета консольных нагрузок на входной вал
Методика расчета консольных нагрузок на входной вал аналогична методике расчета консольных нагрузок на выходной вал.
Читайте также

3260
18.05.26
Какой серводвигатель выбрать для модернизации токарного 16К20Ф3 и фрезерного 6Р13Ф3: параметры выбора, конкретные модели Fanuc и Siemens, совместимость с приводами, частые ошибки
11057
30.08.22
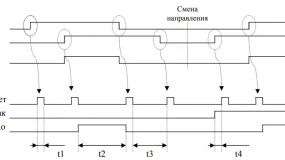
Предназначен для декодирования сигналов инкрементных преобразователей перемещения.
1504
11.05.26
Расшифровка и устранение на станках Mazatrol, Matrix, M Plus. Полный справочник по ошибкам Mazak: Alarm 100/113, 125, 512/513, 1402–1406, ошибки сервопривода, шпинделя, АТС и системные аварии